Delta Robotics
Revolutionizing Automation with High-Speed Precision and Unparalleled Flexibility in Industrial Applications
Introduction:
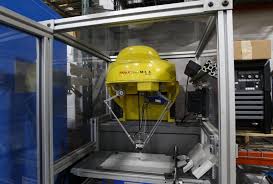
Delta robots are a fascinating innovation in the realm of robotics, offering unparalleled speed, precision, and versatility in various industrial applications. Developed in the 1980s by Reymond Clavel at the École Polytechnique Fédérale de Lausanne (EPFL) in Switzerland, delta robots have since captured the imagination of engineers and researchers worldwide, becoming a cornerstone of automation in industries ranging from electronics manufacturing to food packaging.
Evolution of Delta Robotics:
The concept of delta robots was inspired by parallel-link manipulators, which provide high-speed and high-precision movement. Delta robots, however, offer significant improvements in terms of speed, payload capacity, and workspace flexibility. The design of a delta robot typically consists of three arms connected to universal joints at the base and a common platform at the end effector. This arrangement allows for a wide range of motion and exceptional dexterity, making delta robots ideal for tasks that require rapid and precise movements, such as pick-and-place operations in assembly lines or sorting tasks in warehouses.


Key Components and Working Principle:
Delta robots consist of several key components:
Base Structure:
This is the stationary part of the robot where the three arms are connected via universal joints.
Delta robots are a fascinating branch of robotics engineering, known for their distinctive parallel arm configuration resembling the Greek letter “delta” (∆). These robots offer unique advantages in speed, precision, and flexibility, making them ideal for applications such as pick-and-place operations, high-speed packaging, and assembly tasks in industries ranging from electronics to food processing. At the heart of a delta robot lies its base structure, a critical component that determines its stability, accuracy, and overall performance.
The base structure of a delta robot typically consists of three parallel arms arranged symmetrically around a central point. Each arm is connected to the base and extends outward, forming an equilateral triangle when viewed from above. The end effector, which carries out the desired task, is attached to the free end of each arm. This design provides the robot with a wide range of motion within its workspace, allowing it to reach and manipulate objects with remarkable agility.
One of the key features of the base structure is its use of parallel kinematics, wherein all actuators (motors or other drive mechanisms) are mounted on the fixed base rather than on the moving platform. This configuration offers several advantages over serial kinematic systems, including higher rigidity, faster response times, and improved dynamic performance. By distributing the workload among multiple actuators, delta robots can achieve impressive speeds and accelerations while maintaining precise control over their end effectors.
The geometry of the base structure plays a crucial role in determining the robot’s workspace, payload capacity, and dexterity. Engineers carefully design the dimensions and angles of the arms to optimize these performance parameters for a given application. Factors such as the length of the arms, the angle of inclination, and the distance between the base and the end effector influence the robot’s reach, accuracy, and repeatability.
Materials selection is another important consideration in base structure design. The arms must be lightweight yet durable to minimize inertia and maximize speed without sacrificing strength or stiffness. Common materials used in delta robot construction include aluminum alloys, carbon fiber composites, and high-strength plastics, chosen for their balance of performance, cost, and manufacturability.
In addition to the physical components, the base structure of a delta robot often incorporates sophisticated control algorithms and sensing systems to ensure precise motion and accurate positioning. Real-time feedback from encoders, accelerometers, and other sensors enables the robot to adapt to changing conditions and maintain optimal performance throughout its operation. Advanced motion planning algorithms calculate the trajectories of the end effector to minimize vibration, reduce cycle times, and avoid collisions with obstacles in the workspace.
The versatility of delta robots extends beyond their mechanical design to their ability to integrate with other automation systems. The base structure can be customized with additional features such as vision systems, grippers, and tool changers to expand the robot’s capabilities and adapt it to different tasks. By seamlessly integrating with conveyor belts, robotic arms, and other equipment, delta robots play a central role in modern manufacturing environments, streamlining production processes and enhancing overall efficiency.
In summary, the base structure is a fundamental element of delta robotics, providing the foundation for these high-speed, high-precision machines. Through careful design, materials selection, and integration of control systems, engineers create delta robots that excel in a wide range of industrial applications, delivering unparalleled performance and productivity. As technology continues to advance, the evolution of delta robots promises to revolutionize automation and manufacturing, driving innovation and shaping the future of robotics.
Parallel Arms:
Three parallel arms extend from the base to the end effector. These arms are usually made of lightweight materials such as carbon fiber to minimize inertia and maximize speed.Parallel arms are the defining feature of delta robots, distinguishing them from other robotic configurations and enabling their remarkable speed, precision, and agility. These arms form the backbone of the robot’s structure, providing the framework for motion and manipulation within its workspace. Understanding the design, mechanics, and advantages of parallel arms is essential to appreciating the capabilities and applications of delta robotics.
At the core of a delta robot are three parallel arms arranged symmetrically around a central point, resembling the sides of an equilateral triangle when viewed from above. Each arm is typically composed of lightweight yet rigid materials such as aluminum or carbon fiber, chosen for their strength-to-weight ratio and suitability for high-speed operation. The arms are connected to the robot’s base at one end and extend outward, terminating in an end effector where tools, grippers, or sensors can be attached.
The geometry of the parallel arms is carefully engineered to optimize the robot’s performance for specific tasks and operating conditions. Factors such as arm length, angle of inclination, and spacing between arms influence the robot’s reach, workspace, and payload capacity. By adjusting these parameters, engineers can tailor the robot to meet the requirements of diverse applications, from delicate assembly tasks to rapid pick-and-place operations in industries ranging from electronics to pharmaceuticals.
One of the key advantages of parallel arms is their inherent mechanical simplicity and symmetry, which contribute to the robot’s stability, accuracy, and reliability. Unlike serial manipulators, where each joint depends on the others for support, parallel arms distribute loads and forces more evenly, reducing the risk of deflection, backlash, and mechanical wear. This robustness enables delta robots to maintain precise control over their end effectors even during high-speed movements and accelerations, ensuring consistent performance over long periods of operation.
Parallel arms also facilitate parallel kinematics, a configuration in which all actuators are mounted on the fixed base rather than on the moving platform. This arrangement offers several benefits, including improved stiffness, reduced inertia, and simplified control algorithms. By eliminating the need to move heavy actuators along with the payload, parallel kinematics enable delta robots to achieve faster response times and higher accelerations, leading to shorter cycle times and increased productivity in industrial automation applications.
Another advantage of parallel arms is their ability to decouple translational and rotational motions, allowing the robot to move with greater dexterity and flexibility. Each arm can independently adjust its position and orientation in three-dimensional space, enabling the robot to reach around obstacles, manipulate objects from multiple angles, and perform complex tasks with precision and efficiency. This versatility makes delta robots well-suited for applications such as sorting, packaging, and quality inspection, where speed and agility are paramount.
In addition to their mechanical advantages, parallel arms are also well-suited for integration with advanced control systems and sensing technologies. Real-time feedback from encoders, accelerometers, and vision systems enables the robot to adapt to changing conditions, compensate for disturbances, and maintain optimal performance throughout its operation. By incorporating adaptive control algorithms and predictive analytics, engineers can further enhance the robot’s capabilities and ensure robustness in dynamic environments.
In summary, parallel arms are a fundamental element of delta robotics, providing the framework for high-speed, high-precision motion and manipulation. Through careful design, materials selection, and integration of control systems, engineers create delta robots that excel in a wide range of industrial applications, delivering unparalleled performance and productivity. As technology continues to advance, the evolution of parallel arms promises to drive innovation and shape the future of automation and robotics.
End Effector:
The end effector, or tooling, is attached to the platform at the end of the arms. It can vary depending on the application, ranging from grippers for picking up objects to cameras for vision-guided tasks. The working principle of a delta robot is based on the coordinated movement of its arms. By precisely controlling the length of each arm and the angles between them, the robot can move the end effector to any point within its workspace with remarkable speed and accuracy. This is typically achieved using a combination of motors, actuators, and sensors, along with advanced control algorithms.
The end effector is a critical component of delta robotics, serving as the interface between the robot and the objects it interacts with. As the endpoint of the robot’s parallel arms, the end effector plays a central role in tasks such as picking, placing, sorting, assembling, and inspecting objects in various industrial applications. Understanding the design, functionality, and versatility of end effectors is essential to harnessing the full potential of delta robots in automation and manufacturing.
The end effector of a delta robot is typically attached to the free end of each parallel arm and can take various forms depending on the specific task requirements. Common types of end effectors include grippers, vacuum suction cups, tool holders, cameras, sensors, and specialized manipulators designed for specific applications. The choice of end effector depends on factors such as the size, shape, weight, and material of the objects being handled, as well as the desired level of precision, speed, and flexibility.
Grippers are among the most widely used end effectors in delta robotics, offering a versatile solution for grasping and manipulating objects of different shapes and sizes. They can be designed with fingers, jaws, or suction cups to accommodate various types of payloads, from fragile electronic components to irregularly shaped food items. Grippers may also incorporate features such as compliance, force sensing, and adaptive control to enhance their performance and adaptability in dynamic environments.
Vacuum suction cups are another common type of end effector used for handling flat or non-porous objects such as sheets of paper, glass panels, or electronic wafers. These cups utilize vacuum pressure to create a secure seal between the object and the end effector, allowing the robot to lift and move the object with precision and stability. By adjusting the size, shape, and material of the suction cup, engineers can optimize its grip strength and suction efficiency for specific applications.
Tool holders are specialized end effectors designed to accommodate cutting tools, welding torches, dispensers, or other tools used in manufacturing and assembly processes. These holders may incorporate features such as quick-change mechanisms, tool detection sensors, and coolant or lubricant delivery systems to streamline tooling setup, improve productivity, and ensure consistent quality in production operations.
Cameras and sensors are essential components of end effectors used for vision-guided robotics, inspection, and quality control applications. These devices provide real-time feedback on the position, orientation, color, texture, and dimensional accuracy of objects, allowing the robot to make intelligent decisions and adapt its actions based on the observed data. By integrating vision systems with advanced image processing algorithms, delta robots can detect defects, identify anomalies, and perform precise alignment and positioning tasks with high accuracy and efficiency.
Specialized manipulators are custom-designed end effectors tailored to specific tasks or industries, such as pharmaceutical packaging, automotive assembly, or semiconductor manufacturing. These manipulators may incorporate features such as articulated arms, rotary joints, telescopic booms, or multi-axis motion systems to achieve complex motions and configurations beyond the capabilities of conventional grippers or tools. By leveraging advanced materials, actuators, and control algorithms, these manipulators enable delta robots to perform a wide range of specialized tasks with speed, precision, and reliability.
In summary, the end effector is a versatile and customizable component of delta robotics, enabling the robot to interact with objects in diverse industrial applications. Whether gripping, lifting, manipulating, sensing, or inspecting, the end effector plays a crucial role in achieving the desired outcomes with speed, accuracy, and efficiency. As technology continues to advance, the evolution of end effectors promises to drive innovation and expand the capabilities of delta robots, opening new possibilities for automation and manufacturing in the digital age.
Applications of Delta Robotics:
Delta robots find applications in various industries, including:
Manufacturing:
In electronics assembly, delta robots are used for tasks such as soldering, component placement, and inspection. Their speed and precision help improve production efficiency and product quality.Manufacturing in delta robotics represents a significant leap forward in industrial automation, revolutionizing processes across a wide range of industries. Delta robots excel in tasks requiring high speed, precision, and flexibility, making them ideal for applications such as pick-and-place operations, packaging, assembly, sorting, and quality inspection. From electronics and automotive to food and pharmaceuticals, delta robots are reshaping the landscape of modern manufacturing by enhancing efficiency, productivity, and quality.
One of the key advantages of delta robots in manufacturing is their exceptional speed and agility. The parallel arm configuration enables rapid and coordinated movements, allowing the robot to perform tasks with unprecedented cycle times and throughput rates. In pick-and-place operations, for example, delta robots can swiftly transfer components or products from one location to another, keeping pace with high-speed production lines and maximizing overall output.
Precision is another hallmark of delta robotics in manufacturing. The inherent stiffness and rigidity of the parallel arms, combined with advanced control algorithms and feedback systems, enable the robot to achieve sub-millimeter accuracy and repeatability. This level of precision is essential in applications such as assembly and inspection, where tight tolerances and exacting specifications are paramount to ensure product quality and performance.
Flexibility is a key advantage of delta robots in manufacturing, allowing them to adapt to changing production requirements and handle a wide variety of tasks with minimal downtime. Thanks to their modular design and programmable capabilities, delta robots can be quickly reconfigured or redeployed to perform different tasks or accommodate new product designs. This versatility makes delta robots well-suited for industries with diverse product lines or frequent changeovers, such as consumer electronics, cosmetics, and consumer packaged goods.
Delta robots are also highly efficient in terms of space utilization and resource optimization. Their compact footprint and streamlined design enable them to operate in confined spaces and integrate seamlessly into existing production environments. By maximizing floor space and minimizing material handling, delta robots help manufacturers reduce waste, increase throughput, and lower operating costs, leading to improved overall efficiency and competitiveness.
In addition to their speed, precision, and flexibility, delta robots offer advantages in terms of safety and reliability. Unlike traditional industrial robots with large, heavy arms and limited range of motion, delta robots feature lightweight, compact arms that minimize the risk of collisions and injuries in the workplace. Built-in safety features such as collision detection, emergency stop mechanisms, and protective enclosures further enhance the safety of delta robot systems, ensuring compliance with stringent regulatory standards and industry best practices.
The integration of advanced technologies such as artificial intelligence, machine learning, and internet of things (IoT) further enhances the capabilities of delta robots in manufacturing. AI-powered algorithms enable delta robots to learn from data, optimize processes, and adapt to changing conditions in real time, improving efficiency and quality. IoT connectivity allows manufacturers to remotely monitor and control delta robot systems, gather actionable insights, and proactively address maintenance issues, maximizing uptime and productivity.
In summary, manufacturing in delta robotics represents a paradigm shift in industrial automation, offering unprecedented levels of speed, precision, flexibility, and efficiency. By harnessing the capabilities of delta robots, manufacturers can streamline production processes, increase throughput, improve product quality, and stay competitive in today’s fast-paced global marketplace. As technology continues to evolve and delta robots become increasingly sophisticated, the future of manufacturing holds exciting possibilities for innovation, growth, and transformation.
Packaging:
Delta robots excel in high-speed packaging applications, such as filling bottles, sorting items on conveyor belts, and packing boxes. Their ability to handle delicate items without causing damage makes them invaluable in the food and beverage industry.Packaging is a critical stage in the manufacturing process, where products are prepared for distribution, storage, and sale. Delta robotics has emerged as a game-changer in the packaging industry, offering unparalleled speed, precision, and flexibility in handling a wide range of products and packaging materials. From food and beverages to pharmaceuticals and consumer goods, delta robots are revolutionizing packaging operations worldwide, driving efficiency, quality, and innovation.
One of the key advantages of delta robots in packaging is their exceptional speed and agility. The parallel arm configuration enables rapid and coordinated movements, allowing the robot to pick, place, and manipulate items with incredible dexterity and efficiency. This high-speed performance is particularly beneficial in industries with demanding production schedules and tight deadlines, where minimizing cycle times is crucial to meeting customer demands and maximizing throughput.
Precision is another hallmark of delta robotics in packaging. The inherent rigidity and repeatability of the parallel arms, combined with advanced control algorithms and sensing technologies, enable the robot to handle delicate or fragile items with extreme accuracy and care. Whether placing labels on containers, arranging products in trays, or stacking boxes on pallets, delta robots ensure precise alignment and positioning, minimizing errors and waste while maintaining product integrity.
Flexibility is a key advantage of delta robots in packaging, allowing manufacturers to adapt quickly to changing market demands and product requirements. The modular design and programmable capabilities of delta robots enable them to handle a wide variety of packaging formats, sizes, and shapes, from bottles and boxes to pouches and blister packs. This versatility is especially valuable in industries with diverse product portfolios or frequent product launches, where rapid changeovers and customization are essential to staying competitive.
Delta robots are also highly efficient in terms of space utilization and resource optimization. Their compact footprint and streamlined design enable them to operate in confined spaces and integrate seamlessly into existing packaging lines. By maximizing floor space and minimizing material handling, delta robots help manufacturers reduce waste, increase throughput, and lower operating costs, leading to improved overall efficiency and profitability.
The integration of advanced technologies such as vision systems, artificial intelligence, and machine learning further enhances the capabilities of delta robots in packaging. Vision-guided robotics enables delta robots to identify and adapt to variations in product shape, size, and orientation, ensuring accurate and consistent handling across different packaging formats. AI-powered algorithms analyze data from sensors and cameras to optimize packaging processes, minimize downtime, and improve overall system performance.
In addition to their speed, precision, and flexibility, delta robots offer advantages in terms of safety and reliability. Unlike traditional packaging machinery with complex mechanical components and exposed moving parts, delta robots feature lightweight, enclosed arms that minimize the risk of accidents and injuries in the workplace. Built-in safety features such as collision detection, emergency stop mechanisms, and protective enclosures further enhance the safety of delta robot systems, ensuring compliance with industry regulations and standards.
In summary, packaging in delta robotics represents a transformative shift in the packaging industry, offering unprecedented levels of speed, precision, flexibility, and efficiency. By harnessing the capabilities of delta robots, manufacturers can streamline packaging operations, improve product quality, and enhance the overall consumer experience. As technology continues to evolve and delta robots become increasingly sophisticated, the future of packaging holds exciting possibilities for innovation, sustainability, and growth.
Pharmaceuticals:
In pharmaceutical manufacturing, delta robots are used for tasks such as pill counting, labeling, and packaging. Their sterile and precise operation ensures compliance with strict regulatory standards.
3D Printing:
Delta robots are increasingly being used in additive manufacturing processes, such as 3D printing, where they can rapidly move the print head with sub-millimeter accuracy, enabling the fabrication of complex geometries.
Medical:
Delta robots are finding applications in minimally invasive surgery, where their compact size and precise motion control allow surgeons to perform delicate procedures with enhanced dexterity and accuracy.
Future Trends:
As technology advances, several trends are shaping the future of delta robotics:
Integration with AI and Machine Learning:
Delta robots are increasingly being integrated with artificial intelligence and machine learning algorithms to enhance their capabilities, such as adaptive motion planning and predictive maintenance.
Collaborative Robotics:
Advances in safety features and human-robot interaction are enabling the deployment of delta robots in collaborative work environments, where they can work alongside human operators safely and efficiently.
Miniaturization:
Miniaturized delta robots are being developed for applications requiring precise manipulation in confined spaces, such as micro assembly and medical robotics.
Sustainability:
Efforts are underway to develop more energy-efficient and environmentally friendly delta robots, reducing their carbon footprint and operating costs.
In conclusion:
Delta robots represent a pinnacle of engineering innovation, offering unmatched speed, precision, and versatility in a wide range of industrial applications. As technology continues to advance, delta robotics is poised to play an increasingly vital role in driving efficiency, productivity, and innovation across various sectors.


